プロジェクト
工学、生物学、医学等の多岐に亘る技術情報を統合し新たなロボット開発を
当研究所では、大きく3つのプロジェクトを推進しています。プロジェクト1の対象である水中航走体は、地震・津波及び侵入者に対する海岸や港湾の警戒監視役立つ技術です。プロジェクト2の対象である小型飛翔体は大規模災害時等の上空からの状況調査、不審者の侵入監視システム等に応用できると考えます。プロジェクト3では、生物にみられる拮抗二関節筋の制御機構を応用し、陸上で使用される作業用マニピュレータの制御技術を構築します。これらの成果は、各種マニピュレータ、建設機械、高精度の位置決め機構等に応用可能です。
当研究所は、人間の感覚、運動機能および脳の情報処理システムとしての特性および微小脳システム(昆虫など)の行動原理の研究などを通して、人間と共創でき、抗たん性の高い機械システムの設計を行っていきます。
当研究所で得られた知見や成果は、積極的に公開し、産官学連携による研究を推進し、専門領域を越えた共同研究を行っていきたいと考えています。
< Project1 > 生体機構制御技術の水中航走体およびその周辺機器への応用
- 魚類のヒレや体の屈曲運動等の生体機構の制御メカニズムを応用して推進する、水中航走体の研究開発
- 水中で作業するマニピュレータの研究開発
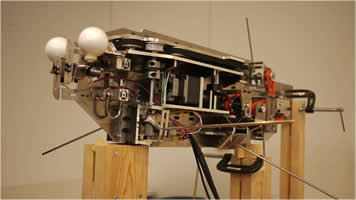
< Project2 > 生体機構制御技術の小型飛翔体およびその周辺機器への応用
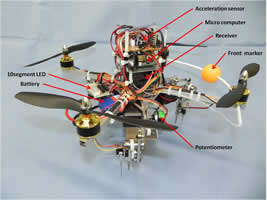
- 複雑な地形でも離着陸できる降着装置の研究開発
< Project3 > 生体機構制御技術の陸上機器およびその周辺機器への応用

- 生体機構を応用したマニピュレータ等の陸上機器の研究開発
研究設備紹介
本研究所の設備についてご紹介します。
水平循環型回流水槽

- 物体に働く流体力計測や物体周りの流れの観察などを行う大型装置