全方位カメラの視覚情報を用いた移動ロボットの協調制御に関する研究

石井諒, 森本和徳
地上移動ロボットに対する被覆制御に関する研究
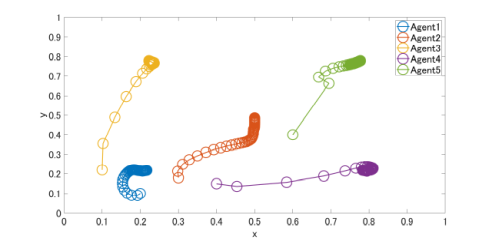
伊藤帆貴
ダイナミクスを考慮したクワッドコプタの制御に関する研究
佐藤寿起
MRヘッドセットによる視線検出を用いたドローンの制御に関する研究
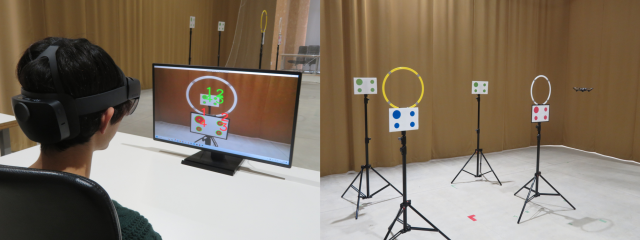
田島祐典, 松本大和
全方向移動ロボットに対するVR 空間での操縦に関する研究

津田萌花
Raspberry Piを用いた自作ドローンの姿勢制御に関する研究
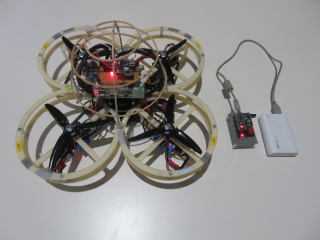
坪井光
建物・道路判別を用いたドローン・複数地上機の視覚フィードバック制御に関する研究
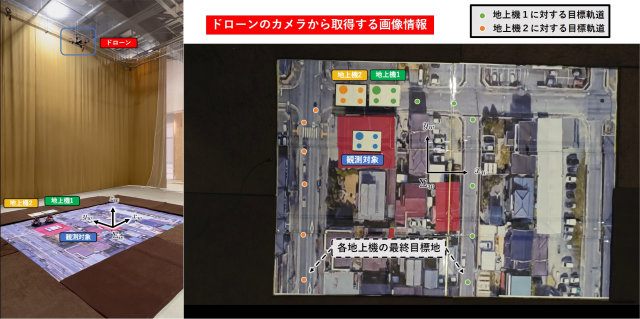
中島悠希, 岩渕颯大
カメラ搭載ロボットの視覚情報による移動ロボットの位置姿勢制御に関する研究