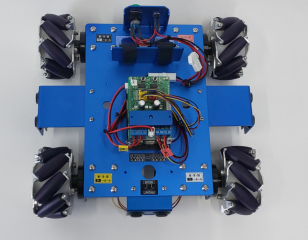
固定カメラの視覚情報を用いた移動体の制御に関する研究
四十崎蒼太
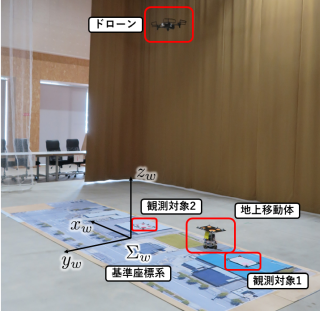
道および建物判別を用いたドローン・地上移動体に対する視覚フィードバック制御
五十嵐壮英, 本田瑚梨都
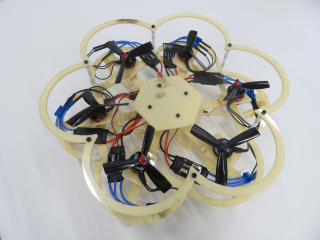
傾斜ロータ構造を有するヘキサコプタの自動飛行を目指す研究
太田諭志, 小泉謙太
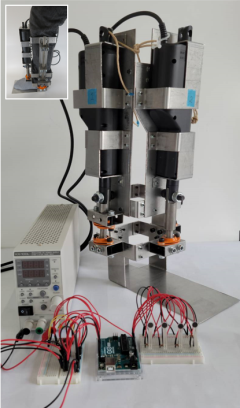
ロッドアクチュエータを用いた電動短下肢装具の研究
奥野舞也, 郷田大貴
制御バリア関数を用いたドローンの衝突回避に関する研究
清原一貴
ハンドトラッキングシステムを用いたドローンの制御手法の開発
中西涼, 山本真也